中国初创公司 Sustain Space 在轨验证柔性机械臂,推进在轨服务能力
摘要: 中国商业航天公司 Sustain Space(三元航天)的 Xiyuan-0 卫星成功完成柔性机械臂的在轨演示验证。该卫星于 3 月 16 日由快舟十一号火箭发射入轨,搭载了柔性机械臂用于测试模拟加注操作、力顺应操控和精密控制。公司于 3 月 25 日宣布所有在轨操作均已成功完成,四种操作模式全部通过验证。
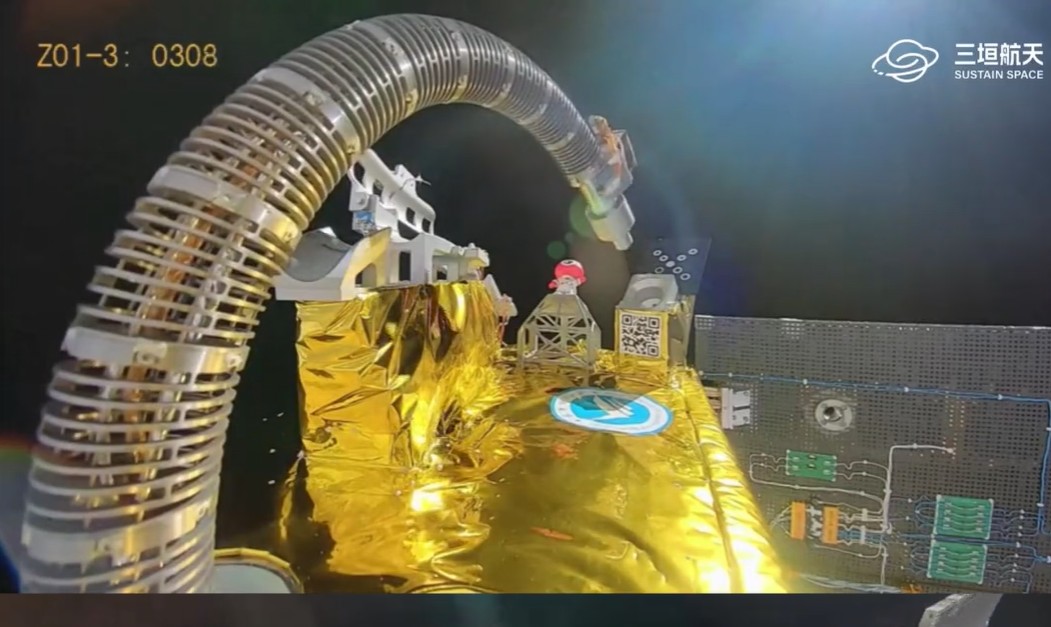
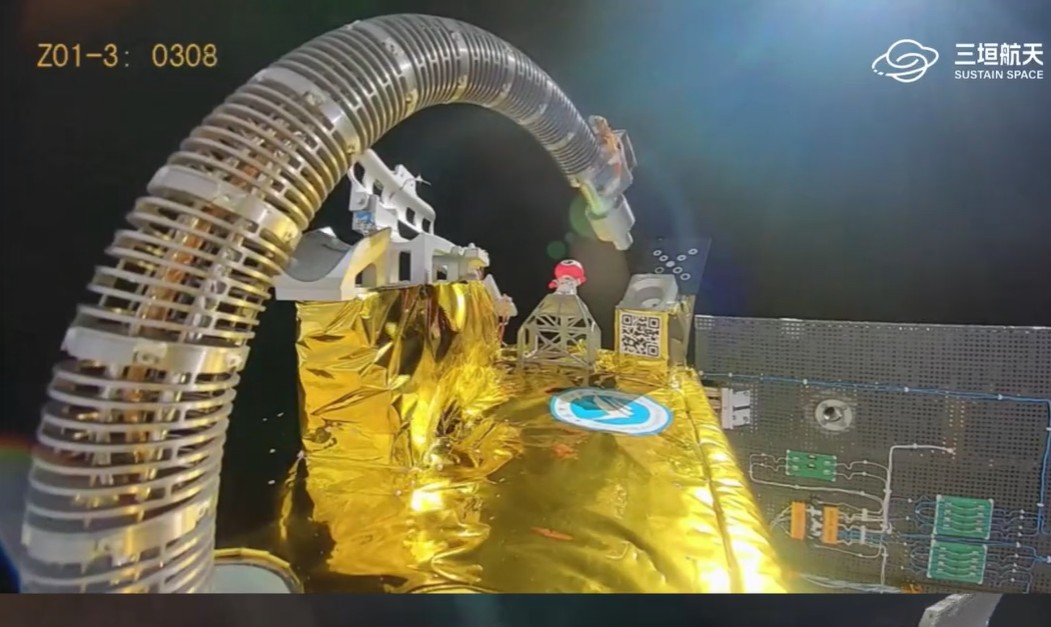
Credit: Sustain Space
任务概述
Sustain Space 的 Xiyuan-0 卫星(又称宇星三号 06 星)于 3 月 16 日搭载快舟十一号火箭发射升空。卫星搭载了一台柔性机械臂,旨在测试模拟加注操作、力顺应操控和精密控制能力。
根据 Sustain Space 3 月 25 日发布的声明,柔性机械臂的所有在轨操作均已成功完成。公司称这是中国商业航天在在轨空间服务领域迈出的重要一步。
四种操作模式验证
Sustain Space 成功验证了以下四种操作模式:
- 预编程自主加注模拟:机械臂按照预设程序自主执行模拟卫星加注操作
- 人工遥操作:地面操作人员实时远程控制机械臂运动
- 视觉伺服操作:基于光学反馈的精密定位和操作
- 力控绘图测试:验证机械臂的力感知和力控制能力
合作伙伴
该卫星的开发涉及多家产学研合作伙伴:
- 深圳魔方卫星技术有限公司:提供卫星平台
- 清华大学深圳国际研究生院:机械臂联合开发
- 湖南科技大学:提供视觉控制和遥操作反馈的光学载荷
- Emposat(航天星源):支持通信和运营
在轨服务前景
此次测试标志着中国在商业在轨服务领域取得了重要进展,包括卫星延寿、太空组装和碎片减缓等能力。值得注意的是,报告的加注活动均为模拟操作,尚未确认实际推进剂传输。
Sustain Space 还将利用 Xiyuan-0 卫星进行一项加速离轨实验——使用可展开的阻力增强球来降低轨道寿命,演示一种减少太空碎片的潜在方法。
全球背景
在轨服务是当前全球航天产业的热点领域:
- 中国的实践-21 和实践-25 航天器据报已于 2025 年在地球静止轨道完成了开创性的在轨加注测试
- 美国 Astroscale、Northrop Grumman 等公司正在用不同技术途径开发类似能力
- NASA 曾于 2024 年取消了 OSAM-1 项目(因延迟和超支),但仍支持在轨服务技术发展